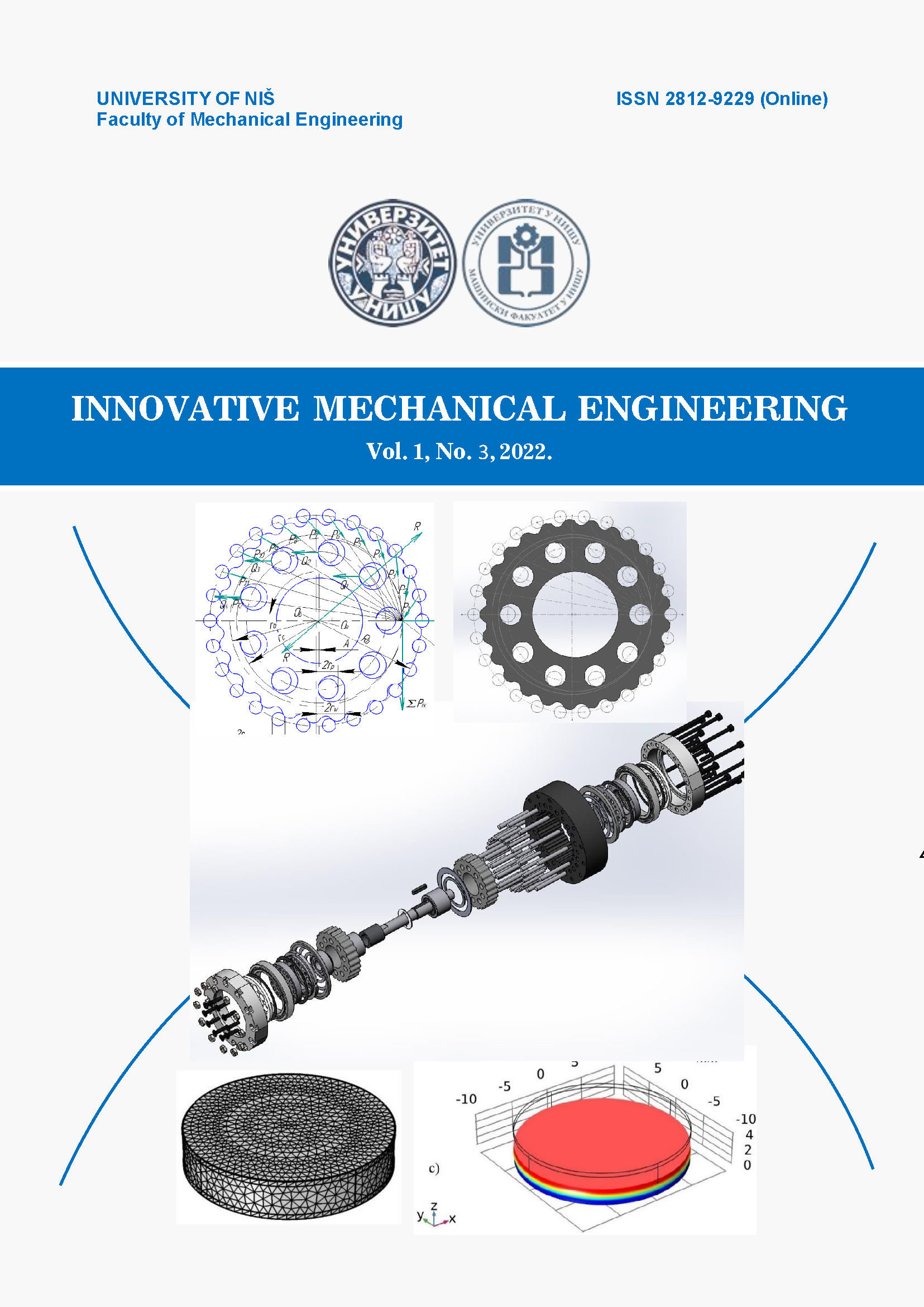
A GEOMETRICAL AND FORCE MODEL OF A MINI CYCLOIDAL GEARBOX FOR A 4-LEGGED ROBOTIC PLATFORM
Keywords:
Robotic actuator, cycloidal disk, pet-robot, GearboxAbstract
Modern light work platforms with four legs can be used in many areas: from toys to specialized mini transporter systems. In such representatives of robotics, a necessary factor for their efficiency is a high torque at a low frequency of rotation on the drives of their four legs. At the same time, a very important condition is the light weight of the drives, which actually consist of electric motors and gearboxes, specifically designed to create a high torque at a low frequency. In order to significantly reduce the weight of the reducer, it is proposed to make most of the cycloidal gearbox parts from plastic, except for the bearings and the shaft with the key. The most important part of the cycloidal gearbox is the cycloidal disk. The article proposes a 3-dimensional model of a cycloidal reducer designed by the authors for a four-legged walking robot toy. The outer diameter of the gearbox is 38 mm, while the weight will not exceed 350 grams if the device is made of steel parts, and not more than 120 grams if its biggest parts are made of plastic.